ul_drv - uLan RS-485 Communication Driver
Pavel Pisa ( pisa@cmp.felk.cvut.cz )
Contents
1 What is uLan2 uLan Message Protocol
2.1 Data Frame Format
2.2 Access Arbitration and Timing
2.3 Control Characters
2.4 Commands or Frame Type Codes
3 uLan driver
3.1 Install driver for Linux
3.1.1 Automatic Driver Startup for Recent Linux Versions
3.1.2 Automatic Driver Startup for Old Linux Versions
3.2 Install KMD for Windows
3.3 WDM Driver for Windows
3.4 Driver Implementation
3.5 Organization of Source Files
3.5.1 Source Files of uLan Driver (ul_drv)
3.5.2 Source Files of uLan Support Library (ul_lib)
3.5.3 Source Files of uLan Utilities (utils)
3.6 Driver Components
3.7 Driver Finite State Machines
3.7.1 Bus State Monitoring
3.8 Receiving Messages
3.8.1 Receive Start of Frame
3.8.2 Receive Data
3.8.3 Receiving the End of the Frame
3.9 Sending messages
3.9.1 Outgoing message processing
3.10 Immediate Actions Processing
3.10.1 Callback functions
3.10.2 Sending frame on the bus
3.10.3 Receiving frames
3.11 Chip drivers
3.11.1 82510 UART Driver
3.12 Higher Protocol Layer
3.13 Driver Clients/Operators
3.14 Client/Operator Services
3.14.1 Opening driver and registration of the client/operator
3.14.2 Closing of the client/operator
3.14.3 Frame data reading and writing
3.14.4 Creating messages
3.14.5 Release of the message from the client/operator
3.14.6 Message pickup by application
3.14.7 Adding a filter member in the client/operator filtchain
3.14.8 Setting driver attributes
3.15 Messages Announcing
3.16 RS-485 Converter
4 uLan Interface and Services
4.1 Message Sending and Reception
4.2 Query Module Type
4.3 Network Control Messages
4.4 Dynamic Address Assignment
5 uLan Object Interface Layer
5.1 Object Interface Messages and Basic Services
5.1.1 ULOI_AOID
5.1.2 ULOI_DOII/ULOI_DOIO
5.1.3 ULOI_QOII/ULOI_QOIO
5.1.4 ULOI_RDRQ
5.2 uLOI Data Exchange
5.3 uLOI Data Types
5.3.1 Visible string
5.3.2 Arrays
5.3.3 Indexed range of data
6 uLan Connection Network
6.1 Process Data Messages Format
6.2 Connection ID to Objects Mapping
6.3 Events to Process Messages Mapping
1 What is uLan
uLan provides 9-bit message oriented communication protocol, which is transferred over RS-485 link. Characters are transferred same way as for RS-232 asynchronous transfer except parity bit, which is used to distinguish between data characters and protocol control information. A physical layer consists of one twisted pair of leads and RS-485 transceivers. Use of 9-bit character simplifies transfer of binary data and for intelligent controllers can lower the CPU load, because of the CPU need not to care about data characters send to other node. Producers of most microcontrollers for embedded applications know that and have implemented 9-bit extension in UARTs of most of today's MCUs. There is the list below to mention some of them :- all Intel 8051 and 8096 based MCUs with UART
- members of Motorola 683xx family ( 68332, 68376, ... )
- Hitachi H8 microcontrollers
2 uLan Message Protocol
2.1 Data Frame Format
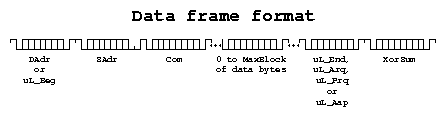
The data frame is a basic communication unit of the uLan protocol. The frame has its destination ( node address, general address or not addressed reply start ), source node, frame type or command, end mark and integrity check xor_sum. The frame consists of sequence of 9-bit characters. Characters are transferred asynchronously, so every character has one start bit, nine data bits and one stop bit, see fig 1. Total transfer time of one character is equal to transfer of 11 bits. Control characters are transferred with bit D8 equal to one. These control characters appears only on begin and end of the data frame.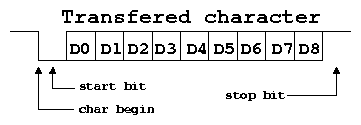
- uL_End
- frame should be transferred into the input queue
- uL_Arq
- frame should be transferred into an input queue, but the sending node is waiting for the acknowledge about successful receiving of the frame. The frame in acknowledged by sending of the character (uL_ACK). In case of xor_sum error or other undefined problem negative acknowledge should be sent (uL_NAK). Delay equivalent to transfer time of more than three characters is considered by the sender as negative acknowledge or missing node with specified address too. The input queue full condition can be signaled to the sender by "wait please" negative acknowledge (uL_WAK). It solves the problem of overloading of the network by repeating attempts to deliver a message to the node, which has no room to receive messages at the moment. The sender node can wait or process other messages before next attempts. uL_Arq cannot be specified for frames with general destination address and reply frames, because of it can lead to parallel sending of uL_ACK from more nodes, which leads to line collision.
- uL_Prq
- proceed request marks frame that needs immediate processing after reception. Next activity is fully defined by command of the frame (Com). Numerical values of these command should be greater than 80h. Processing of such frame can lead to sending or receiving of next frame (for example memory read and write commands implied to use next frame for data).
- uL_Aap
- same as uL_Prq, but acknowledge should be sent before a start of the frame processing. uL_NAK should be sent in case, that the command is unknown to the receiver node.
2.2 Access Arbitration and Timing
The RS-485 line has no standard instruments to distinguish an access collision. The collision can be found only by receiving of corrupted message with bad xor_sum. Because the uLan protocol is relatively slow and it is designed to be used for real-time control, it would be bad to rely on such late collision detect. On the other side, usage of centralized arbiter or token passing behaves badly when some node dies and takes piece of bandwidth. That is why deterministic distributed arbitration scheme has been used.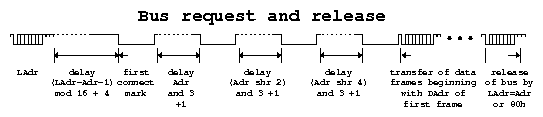
2.3 Control Characters
Control characters have bit D8 set and are received by all nodes. They delimit frames and controls bus busy state by bit D7. The sending of an address with bit D7 and D8 set means release of the bus. All values of control characters except destination addresses are selected such way, that their mutual Hamming's distance is at least 2.| Name | Value | Description |
| DAdr | 100h | General address |
| DAdr | 101h .. 164h | Destination node address |
| uL_Beg | 175h | Begin of unaddressed frame |
| uL_END | 17Ch | End of frame |
| uL_ARQ | 17Ah | End with acknowledge request |
| uL_PRQ | 179h | End with proceed request |
| uL_AAP | 176h | End with acknowledge and proceed request |
| uL_ERR | 17Fh | Error without release of bus |
| LAdr | 181h .. 1E4 | Release of bus by node |
| uL_ERR | 1FFh | Error, abort and release bus |
| Name | Value | Description |
| uL_ACK | 019h | Acknowledge of frame |
| uL_NACK | 07Fh | Negative acknowledge |
| uL_WAK | 025h | Receiver can probably receive message later, but cannot now |
2.4 Commands or Frame Type Codes
Next table shows preferred value ranges of command codes for frames with different processing.| Command Range | Type of Message Processing |
| 00h .. 3Fh | Store to buffer |
| 40h .. 7Fh | Store to buffer without uL_ACK |
| 80h .. 9Fh | Immediate process |
| A0h .. BFh | Process with additional receive |
| C0h .. FFh | Process with additional send |
| Name | Value | Description |
| UL_CMD_RES | 80h | Reinitialize RS485 |
| UL_CMD_SFT | 81h | Test free space in input buffer |
| UL_CMD_SID | F0h | Send identification |
| UL_CMD_SFI | F1h | Send amount of free space in input queue |
| UL_CMD_TF0 | 98h | End of stepping |
| UL_CMD_TF1 | 99h | Begin of stepping |
| UL_CMD_STP | 9Ah | Do step |
| UL_CMD_DEB | 9Bh | Additional debug commands |
| UL_CMD_SPC | DAh | Send state |
| UL_CMD_RDM | F8h | Memory read |
| UL_CMD_WRM | B8h | Memory write |
| UL_CMD_OI | 10h | Standard value for uLan OI |
| UL_CMD_OIr | 11h | Standard type for uLan OI reply |
| UL_CMD_NCS | 7Fh | Network control service |
| UL_CMD_SNST | C1h | Fast status and connection check |
3 uLan driver
ul_drv is the Linux device driver designed to access the uLan network. Today supported hardware is ISA i82510 RS-485 card or simple active converter dongle for standard PC RS-232 ports. The driver version 0.5.5 adds support for PCI card equipped by OX16C950-PCI controller. This version of driver could be compiled for WindowsNT and Windows 2000 as Kernel Mode Driver.3.1 Install driver for Linux
The "Makefile" is a link to "Makefile-mod" to compile driver with your kernel configuration. "Makefile-mod" expect, that kernel sources are in the "/usr/src/linux" directory and that kernel sources and its configuration are of same version as the current running kernel. The kernel source self reference link "/lib/modules/2.y.z/build" is used for new kernels. Enter next command in the ul_drv directory to compile and install the module- make install
- setserial /dev/ttyS2 uart none
- mknod /dev/ulan0 c 248 0 mknod /dev/ulan1 c 248 1 ln -sf /dev/ulan0 /dev/ulan
ul_drv module parameters
- port=<iop>{,<iop> ...}
- up to nine IO port numbers separated by comas for up to four uLan devices
- irq=<int>{,<int> ...}
- select for every defined device corresponding IRQ number. Value 0 means autoprobe.
- chip=<string>{,<string> ...}
- optional specification of used controller chip: auto, 82510, 16450, 16950-pci
- slot=<slot_spec>{,<slot_spec> ...}
- optional, used for PnP cards to find baud and my_adr from slot type (pci), full slot specification (pci00:0c.0) or slot with device interface number specification (pci00:0c.0.1)
- baud=<spd>{,<spd> ...}
- defines transfer baud-rate for every device, default value is 19200
- my_adr=<adr>{,<adr> ...}
- node address of every computer interface as seen from uLan network range is from 1 to 64 default value is 2 for all interfaces
- debug=<int>
- sum of debug flags (FATAL=1, CHIO=2, IRQ=4, MSG=8, FAILS=16, SEQ=32, PORTS=64, FILE=128, FILT=256)
- setserial /dev/ttyS1 uart none insmod ul_drv port=0x2f8 irq=3 baud=9600 my_adr=2
3.1.1 Automatic Driver Startup for Recent Linux Versions
The new Linux module utilities and device management in sontrolled by configuration files stored in the "/etc/udev/rules.d" and "/etc/modprobe.d/ulan" directories. Next UDEV configuration file ensures, that regular users has access to uLan driver/etc/udev/rules.d/10-ulan.rules
- SUBSYSTEM=="ulan",GROUP="users",MODE="0660" ACTION=="add",DEVPATH=="/class/ulan/ulan0",SYMLINK="ulan"
- KERNEL=="ttyS0",RUN+="/bin/setserial /dev/ttyS0 uart none"
/etc/modprobe.d/ulan
- alias /dev/ulan* ul_drv options ul_drv port=0x3f8 irq=4 my_adr=2 baud=19200
3.1.2 Automatic Driver Startup for Old Linux Versions
Add next lines to "/etc/modules.conf" to enable on-demand module loading- alias /dev/ulan* ul_drv alias char-major-248 ul_drv options ul_drv port=0x2f8 irq=3 baud=9600 my_adr=2 pre-install ul_drv setserial /dev/ttyS1 uart none
- LOOKUP ulan$ EXECUTE /bin/ln -s ${mntpnt}/ulan0 ${mntpnt}/ulan LOOKUP ulan.* MODLOAD REGISTER ulan[0-9] PERMISSIONS root.users rw-rw----
3.2 Install KMD for Windows
uLan driver can be compiled as WindowsNT/2000 Kernel Mode Driver. Aspects of this version of driver are described in this paragraph. New WMD PnP version of driver (Windows2000/98) solves some present limitations of KMD version. Manual installation of current KMD version consists of next steps :- driver "ul_drv.sys" file must be copied to system driver directory "%WINNT%/system32/drivers"
- branch "ul_drv" in
"HKEY_LOCAL_MACHINESYSTEMCurrentControlSetServices"
should be added - next keys in "ul_drv" branch are responsible for driver
automatic of start
- "Type"=dword:00000001
- "Start"=dword:00000002
- "ErrorControl"=dword:00000001
- "DisplayName"="UL_DRV"
- "Group"="port"
- "Tag"=dword:00000001
- driver needs to know port address and interrupt line of the ISA card
or serial port, this information is stored in the "ul_drv/Parameters"
registry branch. Next base port address and interrupt line apply for
default jumpers setting of ISA 82C510 card.
- "Port Address"=dword:000003e8
- "IRQ Line"=dword:00000005
- OX16C954 PCI cards are autodetected by the driver when PCI support
is enabled in "ul_drvParameters"
- "ScanforPCI"=dword:00000001
- next keys in the "ul_drvParameters"
registry branch selects communication and internal driver parameters
- "Baud Rate"=dword:00004b00
- "Buffer Size"=dword:00004000
- "My Addr"=dword:00000002
- "Debug"=dword:00000019
- check of correct registry parameters
- "ul_drvenum" branch, "InitStartFailed" and "ImagePath" keys could be deleted
- presence of "ul_drv.sys" in "%WINNT%/system32/drivers" should be checked
- reboot computer
3.3 WDM Driver for Windows
The WDM driver is designed for Windows2000 and Windows98 operating systems. It implements PnP functions. Present version of the driver does not support power management functions. The binary image of WDM version of the driver has been renamed to "ul_wdm.sys" to distinguish it from WindowsNT KMD version ("ul_drv.sys"). Driver can be assigned to one or more PnP standard serial port with RS-485 converter or OX16C954 based PCI cards from device property page of device manager. Next steps could be used to select uLan driver for COM2 serial port.- prepare driver image ("ul_wdm.sys") and installation information ("ul_wdm.inf") in some directory. Copy "ul_wdm.sys" and "ul_wdm98.inf" files to floppy drive in the case of Windows98.
- inspect, that RS-485 converter is plugged to COM2 socket
- open My_Computer � Properties � Hardware � Device Manager
- open branch Ports (COM and LPT) and select Serial Port (COM2) � Properties
- select Driver � Actualization, Installation guide dialog opens
- select Next, then Find optimal driver and Next
- check Look for alternative location and reply right directory where prepared files are located
- check Install one from alternative drivers on next dialog to enable alternative drivers selection dialog and select Next
- choose desired driver, select line with "- uLan xxxx"
extension to install uLan driver .
Same dialog is used to return back to RS-232 driver, when Communication Port (Microsoft) is chosen - Press Next, driver is started at this point and guide is closed after press to Finish
- [HKEY_LOCAL_MACHINESYSTEMCurrentControlSetEnumACPIPNP05012]
- "uLanBaudrate"=dword:00004b00
communication speed, default 19200 Bd - "uLanMyAddress"=dword:00000002
uLan address of PC computer on uLan network
- [HKEY_LOCAL_MACHINEEnumRootUnknown0000]
- [HKEY_LOCAL_MACHINEEnumACPI*PNP050100000002]
- [HKEY_LOCAL_MACHINESystemCurrentControlSetServicesClassPorts0001]
- "DevLoader"="*ntkern" "NTMPDriver"="ul_wdm.sys"
3.4 Driver Implementation
The driver is implemented as relatively independent layers and subsystems. Messages are prepared and received in the driver dedicated memory. This memory is divided into blocks with uniform size with atomic allocation routines. When message is being stored into blocks, head of message with couple of data bytes is stored in the first allocated memory block. If all data cannot be stored in the first block, next blocks are allocated and linked together. The message heads are linked in bidirectional linked lists of messages prepared for sending, processed messages and messages prepared for client notification. These lists or queues are main mechanism for transferring of messages between subsystems. Link protocol is programmed as finite state machine with state stack, which state routines are executed by interrupt handler. State routine can return positive integer information, negative error notification or zero, which leads to wait for next interrupt. Information or error is used as input parameter when state routine is called. When the state routine wants initiate transfer to another state routine it changes pointer to the actual state routine. If previous state routine returns nonzero value new routine is called immediately, in other case next interrupt invokes new state routine. There is stack of callers of actual state routines which enables to constructs state machine subsystems, which can be used in more places in main state machine loop. Main purpose of this state machine is to send or process messages coming in list of messages prepared for sending and if specified, move these messages onto list of messages prepared for client notification. Received messages are put onto this list too. Subsystem is supervised by timeout handler, which can revitalize communication in case of die of other node. The interrupt and timeout handlers are fully SMP re-entrant. The state machine subsystem uses pointers to chip driver routines for hardware port manipulation. This is only part dependent on used chip, today 82510, 16450 and OX16C950PCI. These routines can send and receive 9 bit character, connect to RS-485 line by the arbitration sequence, wait for specified time for character and initialize and close port. File operation subsystem makes interface between OS kernel VFS and client message queues. It enables to prepare single or multi-frame messages and stores notifications of received or processed messages in client's private state structures. This part is heavily operating system dependent.3.5 Organization of Source Files
Source tree contains directory containing driver kernel source files ("ul_drv"), directory with user-space library hiding system dependent kernel driver access routines ("ul_lib") and some example utilities ("utils").3.5.1 Source Files of uLan Driver (ul_drv)
The ("ul_drv") directory contains sources of uLan protocol kernel driver. The sources include support for Linux, DOS, WinNT, Win2000/98 and system-less embedded targets. implementation of 16550 and 82510 chip drivers.includes source of Ox16950 chip driver generic message processing machine own memory blocks allocation and queues of messages more IOCTL generic code code for client notifications and wakeup Linux kernel device and DEVFS interface PCI plug and play library target interface, almost done as stub functions to above generic IOCTL and read and write, enables to link driver directly into application, it can be used under DOS or Linux user-space with IRQ emulation by signals WinNT target interface, which again uses as most of functions developed for Linux kernel as possible.It can be compiled into PnP Win2000/Win98 WDM driver with included conditionals and support sources for PnP.- ul_drv.h
- definition of bidirectional linked lists of messages, atomic memory allocations, message flags and driver instance state structure
- k_compat.h
- header file hiding differences between different Linux kernel versions, it is tested from 2.2.xx up-to 2.6.xx (it could work with kernels down-to 1.3 version)
- ul_hdep.h
- definition of hardware dependent functions and macros for all target systems and definition of kernel internal per client state structure
- ul_c450.c
- chip driver for standard PC serial port
- ul_c510.c
- chip driver for the Intel 82C510, ideal UART chip for 9-bit communication with TM empty interrupt, two independent timers for timeouts and other protocol timing, etc.
- ul_c950pci.c
- Ox16C950, 64 byte FIFO, the possibility of automatic transceiver direction control, all events can be reported by interrupts. All these features are fully used by uLan.
- ul_cps1.c
- USB <-> uLan converter support. Does not work on UART state machine level. It is activated when message is stored in prep_bll and when there is free slot, forwards message to the external converter over USB. It receives sent messages confirmation and incoming messages from converter and stores these in proc_bll.
- ul_frame.c
- sends and receives sequences for frame start and end of frames
- ul_ufsm.c
- state machine. It monitors medium state and when it is not occupied and there is message ready to be sent on prep_bll queue it starts arbitration and if media arbitration is successful outgoing message processing is started. Message is moved on work_bll. Processed message and messages received from other devices are moved to processed messages queue proc_bll. Messages are then outside of interrupt context announced to the driver clients. As long as they are not processed by clients, they are kept on the opan_bll queue. In the case of interface which does not use character based state machine (ul_cps1.c - USB), ul_ufsm.c logic is not used and messages are moved from prep_bll to proc_bll directly by higher level chip driver.
- ul_mem.c
- memory management. Driver allocates for each channel memory buffer divided into pool of constant size blocks. The blocks are allocated for messages as messages are created and grows and due to poll concept, block can be allocated in interrupt context. The first block contains a header with the message control information and fields used for linking the bi-directional list BLL. There are four lists/queues per channel prep_bll / work_bll / proc_bll / opan_bll. The rest of the first block space unused for control information is used as start of data buffer for message. If the message is longer, there is attached a chain of additional blocks, which contain only data.
- ul_base.c
- basic operations used for preparation, initiation of sending, receiving messages, etc. The functions in this file are as far as possible target system independent.
- ul_linux.c
- driver envelope for Linux operating system and character device implementation
- ul_inlib.c
- for linking of applications with driver to use driver code directly in user-space for DJGPP / DOS, system-less targets and Linux user-space test builds
- ul_djgpp.c
- auxiliary functions for DJGPP (interrupts, timing, logging)
- ul_wdbase.c
- common basis for Windows WDM (XP/2k/98) and KMD (NT)
- ul_kdmnt.c
- KMD Windows (NT)
- ul_wdent.c
- desolation and closure for WDM (XP/2k/98)
- ul_wdpnp.c
- PnP support required for WDM
- ul_wdpwr.c
- minimal power management support for WDM
- ul_wdusb.c
- auxiliary functions to hide differences in Windows USB infrastructure implementation
- ul_linpci.c
- general mapping function driver for PCI hardware under Linux
- ul_linusb.c
- general function for Linux USB device enumeration
- ul_debug.c
- debugging support routines
- emu_irq.c
- IRQ emulation of the Linux user
- ul_di.c
- iterator data for iteration through characters and blocks of messages
- ul_drv.c
- sources wrapper
- ul_tors.c
- system independent parts of uLan driver instance constructor and destructor
- ul_devtab.c
- table containing vendor and product identifiers for PnP PCI and USB devices enumeration for Linux and Windows operating systems
- ul_tst.c
- low level test routines
3.5.2 Source Files of uLan Support Library (ul_lib)
The directory ("ul_lib") holds sources for library implementing basic message processing (send, receive, filtering and notification) and some common commands used b applications. Its main purpose is to hide system specific interface to the driver and provide portable uLan network API.- drv_def.h
- target system dependent parts of user-space driver API
- ulan.h
- target system independent part of API usable under Linux/DOS/NT etc.
- ul_l_drv.c
- kernel driver interface access functions, replaced by direct inclusion of driver into library for DOS target
- ul_l_msg.c
- basic message sending and reception functions
- ul_log.c
- simple logging facilities for messages send and processed by applications
- ul_l_oi.c
- basic primitive functions for higher object uLan layer
3.5.3 Source Files of uLan Utilities (utils)
The sources of command line test utilities and programs which are mostly independent on target systems are located in ("utils") directory.- ul_buftst.c
- test of hardware of line transceivers
- ul_spy.c
- uLan message monitor
- ul_sendhex.c
- intelhex and binary downloader and uploader
3.6 Driver Components
The driver is implemented in a relatively independent and the subsystems. The individual components of the drivers are:- General support for the allocation, iteration, filling, handling and reading the messages consisting of one or more frames. This subsystem includes a list of free blocks free_blk, queue of outgoing messages which are ready for processing prep_bll, currently processed message work_bll, queue of already processed or received messages prepared for distribution to operators/clients proc_bll and the list of messages waiting for completion of processing by the operators opan_bll.
- General support for the creation and cancellation of driver instance and the choice of chip drivers according to interface hardware type.
- Interface for access from the user-space when driver is used on operating systems utilizing memory protection (Linux, Windows NT and Windows WDM driver model) or for integration into the firmware of small embedded devices, without operating system.
- Implementation of the general finite state machine (UFSM) for those cases where the implementation of the protocol uses UART, which handles data at the level of individual characters, whether the hardware FIFO is or is not used. This layer is not used, when the entire frames or messages are transferred to the hardware/device which implements protocol prescribed messages transmit and receive itself (this is case of the host side driver when uLan-USB converter connected to PC is used).
- The chip drivers implement ul_call_fnc type functions fnc_recch (receive character function), fnc_sndch (send characters function), fnc_wait (waiting for the reception or specified time expire), fnc_connect (connection to the media), fnc_finishtx (waiting for end of transmission and bus driver switching for receive), fnc_pool (test interrupt presence and event type) in the case of generic UFSM use. In the case where the whole messages are transmitted to hardware or interface specific service thread is used, these functions are not used and activation of message processing is achieved by chip driver functions fnc_stroke invocation.
3.7 Driver Finite State Machines
The uLan communication protocol processing is implemented as finite state machine. Function of this machine (UFSM) will be described in detail in the following paragraphs. The state transition diagrams are used for better understanding of individual state transitions and calls of the lower level state machine states. Ovals and octagons represent the states of the finite state machines (represented by individual state processing functions in the driver code). Rectangles represent calls/activations of lower level machines. The gray color ovals and octagons represent entry points to lower levels of the machine. The octagons marks states with possibility of returning to a higher level machine. The edges with arrows shows transitions between different states of the machine and lower levels calls. The highest level state machine controller is schematically illustrated in Figure 4. From the diagram, it is apparent that the central node consists of functions uld_drvloop. This function serves as a sort guide-post. It divides operations into three main directions which are:- Receiving messages
- Sending messages
- Bus state monitoring
3.7.1 Bus State Monitoring
If no other action is required (send/receive of message) the functional link UDRV_fnc_recch is called. This link will activate specific chip provided function to wait for character receive. The actual function invoked is given by chip support selected during driver instance creation. In all cases, the task of this function is to take a character from the bus and write it into the character buffer in the driver instance state structure. The actual implementation of functions for different architectures will be described later. After capturing the character, processing is moved back to the central node (uld_drvloop).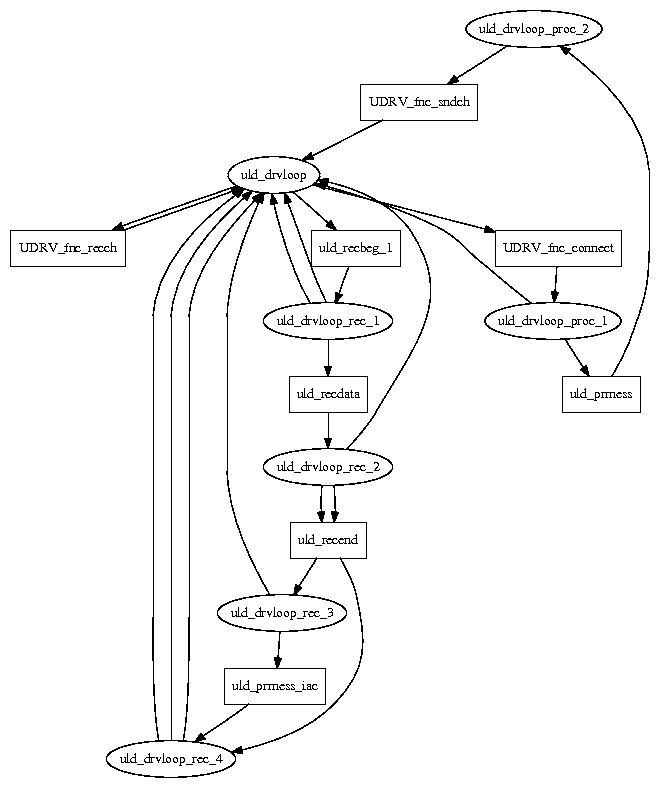
3.8 Receiving Messages
If the character (which is located in the character buffer of driver state) with bit D8 set is received and its code is equal to the own device address or broadcast address (0) or if driver promiscuous mode is enabled, the subroutine to process beginning of the incoming message frame receive is set (function uld_recbeg_1, description can be found below) and then moves into the state uld_drvloop_rec_1. As uld_drvloop_rec_1 allocates a memory block of type ul_mem_blk (message) from free_blk and fills it with the received frame header information (SAdr, DAdr, CMD). The filled head block of a message is moved onto work_bll queue and receipt ion (inactivity) timeout function is set to uld_drvloop_rec_error to recover from state, when frame sender dies unexpectedly. Then the procedure uld_recdata (description can be found below) is called which implements receiving of data contained in the message and continues with the uld_drvloop_rec_2. The uld_drvloop_rec_2 state continues by state uld_drvloop_rec_3 if immediate messages processing/reaction support is compiled in. Otherwise, the state uld_drvloop_rec_4 is entered. Before transition into one of the two possible states, the end of the frame reception uld_recend (terminating characters, checksum etc. ) is processed. The processing of the uld_drvloop_rec_3 state checks whether reception finished without error and calls subroutine for immediate actions/response processing uld_prmess_iac. The finite state machine advances to the state uld_drvloop_rec_4. In this state, the driver timeout function is set back to an empty action and a stamp is assigned to the message, which serves as a unique identifier for later distribution of messages at higher levels. Finally, the message is moved to the input queue and the distribution of the message to clients is scheduled. The finite state machine returns to the central state (uld_drvloop).3.8.1 Receive Start of Frame
Receive start of frame is illustrated by state diagram in Figure 5.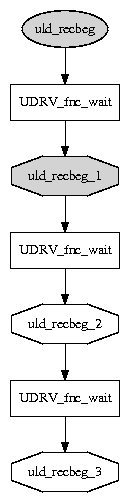
3.8.2 Receive Data
This procedure is sequentially receives data bytes using which are stored in the prepared ul_mem_blk type structure with use of data iterator as shown in Figure 6. The data receive is terminated if the control character (DB8 = 1) is received or if there is not enough memory to store data.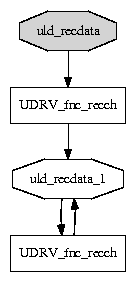
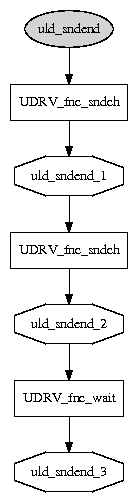
3.8.3 Receiving the End of the Frame
The finalization of frame receive starts in states uld_recend and uld_recend_1 as shown in Figure 7. The next character reception is initiated until received character or character found in the buffer has ninth bit set (termination character). According to the value of this character (UL_ARQ, UL_PRQ etc.) connection flags and actual frame flags are set. Then receive of data checksum and state transition to uld_recend_2 state are initialized. If the confirmation of the frame is required and reason to receive frame is not in effect of promiscuous mode, the confirmation character is sent and the state advances to (uld_recend_3). If promiscuous mode is enabled, check is performed whether the frame was confirmed by someone else. If not the message will be marked as incorrect (flag UL_BFL_FAIL). If no confirmation is requested then the sub-state machines return control to upper level directly in state uld_recend_2.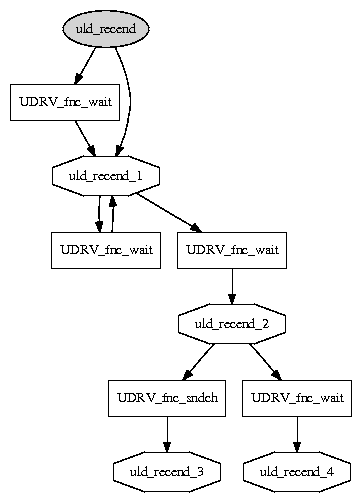
3.9 Sending messages
If the queue of messages prepared for output/processing (prep_bll) is not empty then the top-level state machine advances from idle state to the process of connecting to the bus using UDRV_fnc_connect (specific chip/hardware related functions beginning UDRV are described later). After the media arbitration and connect sequence is executed, the main finite state machine advances to state uld_drvloop_proc_1. The first action for uld_drvloop_proc_1 state is moving of the first message in the output queue onto the internal working queue (work_bll). The timeout function is set to uld_drvloop_proc_error handler to protect bus against stale state. Timeout functions will be called if the preset timer overflows. Then the outgoing message processing state machine is activated by call to the uld_prmess entry point, which takes care of the message itself and its functions will be explained in the next subsection. If the timeout or other error is detected during message processing then function uld_drvloop_proc_error re-attempt to send the message unless the message flag set UL_BFL_NORE or the maximum number of transmission attempts (UL_RETRY_CNT) does not exceed the limit. Otherwise, the message error flag (UL_BFL_FAIL) is set and placed it into the input queue which informs the higher protocol layers about inability to send a message to the recipient. If the transmission of messages is correctly processed, the main state machine reaches state uld_drvloop_proc_2. In this state, the timeout function is unregistered/set to empty and bus/media control is relinquish by preparing and sending character with own module/device address and bits D8 and D7. The character prepared in the buffer is sent to the media by invocation UDRV_fnc_sndch function and media is released. Finally, the message is checked for UL_BFL_M2IN flag. If the flag is set, the message is moved onto the input queue (proc_bll). Then the higher protocol layers are informed about message which processing status should be examined.3.9.1 Outgoing message processing
The sub-machine is schematically illustrated in Figure 8. The message can consist from multiple frames and each frame processing result in sending frame to the bus or reception of frame resulting from immediate action processing in other module/device. The decision about these two main options is taken in uld_prmess_frame state.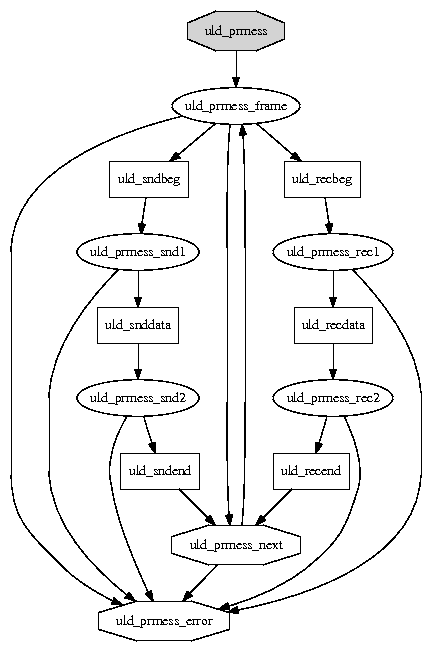
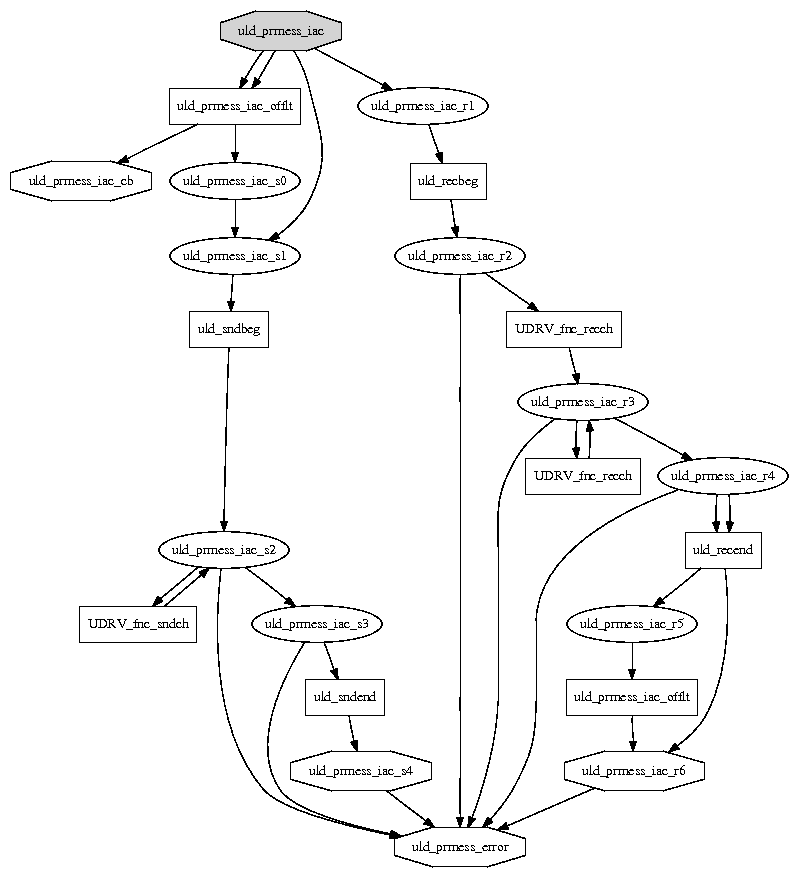
3.10 Immediate Actions Processing
This subroutine is called in the receiving part of the machine if the message flag UL_PRQ is set. The immediate actions processing state machine is shown in Figure 12. The entry point of this sub-machine is uld_prmess_iac. There is executed testing for possible registered immediate action according to value of com (command) field of received frame. If there is registered action for the received com value then the next processing is controlled by prescription specified by found immediate action structure. Possible actions are as follows:- call callback function
- sending data already pre-filled in action buffer as a frame onto bus
- sending of data generated by user-defined function
- reception of the additional frame
3.10.1 Callback functions
If the UL_IAC_BFL_CB_OFFLT is set in registered immediate action structure then the processing includes uld_prmess_iac_offlt state which ensures that transceiver output is disabled by call of chip driver function UDRV_fnc_finishtx (picture 13). The entire process is completed by calling the function uld_prmess_iac_cb.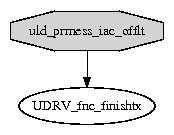
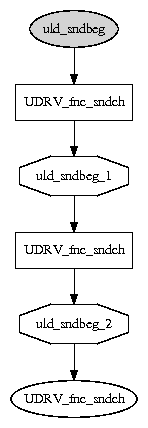
3.10.2 Sending frame on the bus
There are two variants of sending answers on the bus. In the first case (UL_IAC_OP_SNDBUFF action operation), the data already prepared in the action buffer during action registration are sent as consequence of processing state uld_prmess_iac_s1 invocation. However, if the UL_IAC_OP_SND operation is specified the transceiver output is switched off and user provided callback function is executed in state uld_prmess_iac_s0. This function can prepare data buffer content to be sent and has even access to the previous received frame header and data. In both cases, the actual data transmission begins in the state uld_prmess_iac_s1. This state includes the preparation of the frame header, places 0x7f DAdr which corresponds to unspecified recipient target/response begin UL_BEG. When frame header is sent, the state advances to uld_prmess_iac_s2. Then frame data are sent according to buffer specification in the action structure. The frame end with type UL_END follows.3.10.3 Receiving frames
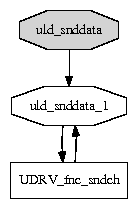
This procedure is very similar to the reception of the classic frames with one exception. Received frame data are not stored in any queue but state uld_prmess_iac_r3 processing ensures that data are stored directly into buffer specified during immediate action registration. If for various reasons the frame processing fails or error is indicated the transition to state uld_prmess_error is executed error function is called.3.11 Chip drivers
The hardware dependent functions are provided by chip driver support implementations. This design allows to use same driver core for different architectures, chips, providing implementations of an abstract state machine functions to connect to the bus (arbitration including access to the medium), reading and posting character. These functions are set by routine which initializes specific hardware support. There are already implemented drivers for different UART (universal asynchronous receiver/transmitters) types: 82510, 16450, OX16950 and MPC5200. The following subsection describes the concept of these functions on example implementation of these functions for the 82510 UART.3.11.1 82510 UART Driver
The basic functions of this driver are characterized by state machine drawn in Figure 14.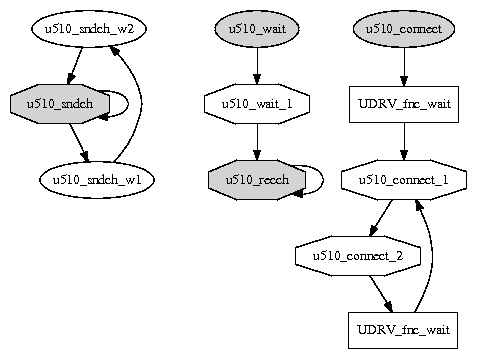
3.12 Higher Protocol Layer
- General support for the allocation, iteration, filling, handling and reading the messages consisting of one or more frames.
3.13 Driver Clients/Operators
Applications participating in uLan communication accesses driver through the objects that are called the driver clients/operators. The client/operator is a structure which represents state and communication interests of given user application driver open instance. The set of general layer functions is independent of used operating (Windows, Linux, system-less environment) and the same set of functions is provided to the application by system calls wrapper library. The client/operator is represented on driver side by ul_opdata state structure. The most important fields of the structure are:- udrv - pointer to driver structure to which the client belongs to
- opnext and opprew - represent pointers to the preceding and the following instance of a list of clients/operators belonging to the same driver instance (hardware/chip device)
- message - a pointer to the first frame of actually prepared/processed message
- data - the iterator to access data in individual frames of the message
- recchain - start of the list of structures/members pointing to received or processed messages which waits for given client/operator processing. Some client specific tags for message are held in these structures as well
- filtchain - the purpose of this list is filtering of incoming messages. The list members are of same type members as a recchain. The list members holds information about message header parameters which are of interest of client/operator.
3.14 Client/Operator Services
The applications call functions located in uLan driver support library with the handle identifying the client. The handle type is operating system specific and application obtains it as return from ul_open function call. Essential services are:3.14.1 Opening driver and registration of the client/operator
The client state is created ul_open function call. The function first input parameter specifies requested driver, typically file name of device which has been registered during driver instance initialization. Multiple driver instances utilizing different UART or other uLan bus interface hardware can be used simultaneously. The uLan driver registered device names corresponding to each operating system conventions are shown in Table 1.| Name of equipment | Platform | |
| .UL_DRV(x) | Windows | |
| /dev/ulan(x) | Linux | |
| NULL | system-less or default driver instance |
3.14.2 Closing of the client/operator
This operation is provided by functions ul_close. First, it removes client remaining client messages and interest filters and then removes the client/operator state structure from the list of diver instance clients. Finally, the state structure memory is returned.3.14.3 Frame data reading and writing
The ul_read function copies data from the currently processed frame client/operator provided buffer. The ul_write function works on the same principle with the difference that the direction of data flow is opposite.3.14.4 Creating messages
The ul_newmsg function creates new message and fills its firs frame header according to input parameters. The frame processing flag UL_BFL_SND is set and message field of client/operator state structure is set to reference this frame. If the message is intended to have multiple frames then consecutive frames are added to message by ulan_tailmsg call. This function creates a frame according to provided parameters same way as ul_newmsg but also sets the preceding frame of message chain as its predecessor.3.14.5 Release of the message from the client/operator
The ul_freemsg first first determines whether the message currently handled by the client has already allocated unique message stamp. If the message stamp is already assigned then the actual message represent received or processed message and its reference counter is lowered and message is possibly released from memory. Otherwise message is intended for sending/processing and the unique stamp identifier is not previously set. The stamp is allocated and filled into the message and message is passed for further processing. Furthermore, if the UL_BFL_M2IN message flag is set then the member for filter list is allocated and its stamp field is filled by same value as filled in message, its state is set to UL_OPST_ONCE and then it is inserted in client/operator filter chain (filtchain). The importance of this behavior will be explained later in the section devoted to clients. Finally, the message is forwarded to the output queue for further processing by the driver which executes message frame sending and other processing.3.14.6 Message pickup by application
The application asks driver if there is some message fulfilling declared interests by call to ulan_acceptmsg function. The messages passing criteria specified by members of filtchain are collected in recchain queue. The first member of this queue is set-up as actually processed (message field of client/operator state) and information about first frame of the message is returned by call. If the message has multiple frames, the ulan_actailmsg function is used to move on next frame and to acquire attributes of its header.3.14.7 Adding a filter member in the client/operator filtchain
The application specifies which messages should be delivered to it by filter chain members registration. Adding of members is requested by call to ul_addfilt function. It allocates and fills a member in accordance with provided input parameters. Messages of client/operators interest may be characterized by first frame header attributes (DAdr, SAdr, com and stamp). Then the member filtering method is selected (should trigger only once or multiple times) and member is put on filtchain.3.14.8 Setting driver attributes
The library also contains functions that directly set driver control attributes. One such function is ul_setmyadr which is used to set own module/device address by which device is identified in the uLan network. Another example is the function ul_setpromode, which provides activation and deactivation of promiscuous driver mode, in which the all traffic on the bus is is monitored and can be delivered to the appropriate clients/operators. The ul_setidstr function sets data for immediate response to the reception of identification request.3.15 Messages Announcing
The received or processed messages are moved onto input queue (proc_bll) and further processing is scheduled. The message analysis and distribution to operators is deferred to ulan_do_bh procedure. This function retrieves messages from input queue one by one and calls function ulan_proc_arrived for each of them. The arrival processing function matches first frame header attributes against interests of all operators by comparing attributes (DAdr, SAdr, com and stamp) to ones specified in filtchains members. Only non-zero value attributes of filter chain members are significant in comparison. The filter chain includes even members responsible for delivering processed messages generated by given client/operator back into its queue for processing result check. If the filter member is found satisfying the above conditions, further action is to deliver message to corresponding client/operator. Message is not copied but filter member structure is directly used or copied as reference to given message and it is queued onto client/operator recchain list. If a filter list member state is UL_OPST_ONCE then filter members is directly moved to receive list which effectively removes given filter member from future match testing. If the filter member state is UL_OPST_FILT, the copy if filter member is allocated and only that copy provides message reference in client/operators recchain and original filter member ensures that all other messages matching criteria will be delivered to given client/operator.3.16 RS-485 Converter
In figure 15 is shown schematic diagram of simple RS-232 to RS-485 dongle converter. This converter is powered directly from �12V signals of regular RS-232 port. RTS signal is used for enabling of line driver. CTS signal is used for direct line logic level reading. Interconnection of TxD and DSR enables timing by sending of zero characters when output driver is disabled. Then modem status interrupt can serve as transmit machine empty interrupt, which is not natively implemented in PC COM hardware.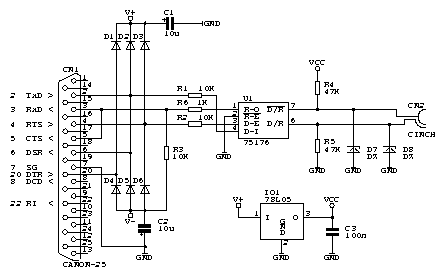
4 uLan Interface and Services
4.1 Message Sending and Reception
Every uLan interface (hardware port) is seen as one special character file under Linux operating system or system device under WindowsNT. All client program operations are accessible through standard open, close, read, write, ioctl and select system calls. The ioctl calls are used for preparation and sending of new messages and for selecting, which external messages will be received by associated file handle. The ul_msginfo structure is used for all message and frame oriented ioctls.- typedef struct ul_msginfo { int dadr; /* destination address */ int sadr; /* source address */ int cmd; /* command/frame type */ int flg; /* message flags */ int len; /* length of frame */ unsigned stamp; /* unique message number */ } ul_msginfo;
| Name | Description |
| UL_BFL_LOCK | locked message is pointed only once |
| UL_BFL_MSST | Message must be received by some proces |
| UL_BFL_M2IN | After successful processing inform sending client |
| UL_BFL_LNMM | Length of received frame must match expected len |
| UL_BFL_FAIL | Message cannot be processed - error status |
| UL_BFL_TAIL | Multiframe message continues by next bll block |
| UL_BFL_SND | Send this frame |
| UL_BFL_REC | Receive answer frame into this bll block |
| UL_BFL_VERL | Verify free space in buffer of destination station |
| UL_BFL_NORE | Do not try to repeat if error occurs |
| UL_BFL_REWA | If error occurs do wait with retry |
| UL_BFL_PRQ | Request immediate processing of frame by receiving station |
| UL_BFL_ARQ | Request immediate acknowledge by receiving station |
| Name | Argument | Ptr data dir | Description |
| UL_DRV_VER | Returns driver version | ||
| UL_NEWMSG | ul_msginfo *ptr | W | Prepare new outgoing message |
| UL_TAILMSG | ul_msginfo *ptr | W | Add next frame to message |
| UL_FREEMSG | Free (send) prepared or received message | ||
| UL_ACCEPTMSG | ul_msginfo *ptr | R | Accept message from receive queue |
| UL_ACTAILMSG | ul_msginfo *ptr | R | Accept next frame of multiframe message |
| UL_ADDFILT | ul_msginfo *ptr | W | Add specification for receiving of messages |
| UL_ABORTMSG | Abort preparation of message | ||
| UL_REWMSG | Return to beginning of first frame of message | ||
| UL_STROKE | Restart processing loop of driver | ||
| UL_DEBFLG | debug mask | Set kernel driver debug level | |
| UL_HWTEST | subcommand | RS-485 buffer hardware checking |
Opening and closing uLan file handle
The file descriptor (handle) is obtained from open system call with correct device name parameter. The conventional name for first interface is "/dev/ulan" for Linux and ".UL_DRV" for WindowsNT based systems.- int ul_fd; ul_fd=open(ul_dev_name, O_RDWR, S_IWRITE - S_IREAD); if(ul_fd<0) { perror("print_nodes : uLan open failed"); return -1; }; /* uLan communication through ul_fd possible */ close(ul_fd);
Sending of message or command
New message must be created with module destination address, command type and flags. Data write is optional. Message is send into output queue for transmission after client UL_FREEMSG ioctl. This ioctl returns message unique identifier to the sender of message and for messages with UL_BFL_M2IN flag prepares single shot filter which serves for client transmission result notification.- int send_command(int ul_fd,int dadr,int cmd,int flg,void *buf,int len) { int ret; ul_msginfo msginfo; memset(&msginfo,0,sizeof(msginfo)); msginfo.dadr=dadr; msginfo.cmd=cmd; msginfo.flg=UL_BFL_M2IN - flg; ret=ioctl(ul_fd,UL_NEWMSG,&msginfo); if(ret<0) return ret; if(len)if(write(ul_fd,buf,len)!=len) { ioctl(ul_fd,UL_ABORTMSG); return -1; }; return ioctl(ul_fd,UL_FREEMSG); };
- int ul_fd_wait(int ul_fd, int wait_sec) { int ret; struct timeval timeout; fd_set set; FD_ZERO (&set); FD_SET (ul_fd, &set); timeout.tv_sec = wait_sec; timeout.tv_usec = 0; while ((ret=select(FD_SETSIZE,&set, NULL, NULL,&timeout))==-1 &&errno==-EINTR); return ret; }
- int send_command_wait(int ul_fd,int dadr,int cmd,int flg,void *buf,int len) { int stamp; int ret; ul_msginfo msginfo; stamp=send_command(ul_fd,dadr,cmd,flg,buf,len); if(stamp<0) return stamp; while(1) { ret=ul_fd_wait(ul_fd,10); if(ret<=0) return ret?ret:-1; ret=ioctl(ul_fd,UL_ACCEPTMSG,&msginfo); if(ret<0) return ret; ioctl(ul_fd,UL_FREEMSG); if(msginfo.stamp==stamp) { if(msginfo.flg&UL_BFL_FAIL) return -2; else return 1; }; }; };
Sending immediate query
Most of field-bus area networks have one specific feature missing and in most cases impossible to implement in LAN or WAN area networks. It is ability to request and receive answer immediately after last byte of query command. This feature is defined and generalized in uLan network. Simplest case consisting of master to slave command frame and slave to master immediate reply is discussed here. As in above examples, code is divided into part which prepares and sends message and and result waiting loop. The second part should be implemented as event handling for bigger applications.- int send_query(int ul_fd,int dadr,int cmd,int flg,void *buf,int len) { int ret; ul_msginfo msginfo; memset(&msginfo,0,sizeof(msginfo)); msginfo.dadr=dadr; msginfo.cmd=cmd; msginfo.flg=UL_BFL_M2IN - flg; ret=ioctl(ul_fd,UL_NEWMSG,&msginfo); if(ret<0) return ret; if(len)if(write(ul_fd,buf,len)!=len) { ioctl(ul_fd,UL_ABORTMSG); return -1; }; memset(&msginfo,0,sizeof(msginfo)); msginfo.flg=UL_BFL_REC - UL_BFL_M2IN; if(ioctl(ul_fd,UL_TAILMSG,&msginfo)<0) { ioctl(ul_fd,UL_ABORTMSG); return -1; }; return ioctl(ul_fd,UL_FREEMSG); };
- int send_query_wait(int ul_fd,int dadr,int cmd,int flg, void *bufin,int lenin,void **bufout,int *lenout) { int stamp; int ret; int len; ul_msginfo msginfo; stamp=send_query(ul_fd,dadr,cmd,flg,bufin,lenin); if(stamp<0) return stamp; while(1) { ret=ul_fd_wait(ul_fd,10); if(ret<=0) return ret?ret:-1; ret=ioctl(ul_fd,UL_ACCEPTMSG,&msginfo); if(ret<0) return ret; if(msginfo.stamp==stamp) { if(msginfo.flg&UL_BFL_FAIL) {ioctl(ul_fd,UL_FREEMSG); return -2;}; ret=ioctl(ul_fd,UL_ACTAILMSG,&msginfo); if(ret<0) {ioctl(ul_fd,UL_FREEMSG); return ret;}; if(bufout&&lenout) { len=msginfo.len; if(!*bufout) *bufout=malloc(len); else if(*lenout<len) len=*lenout; if(read(ul_fd,*bufout,len)!=len) {ioctl(ul_fd,UL_FREEMSG); return -3;}; *lenout=len; }; ioctl(ul_fd,UL_FREEMSG); return msginfo.len; }; ioctl(ul_fd,UL_FREEMSG); }; };
Receiving external messages
Filters must be specified to receive external messages by client. The filter specifies which messages with which source (sadr), destination (dadr) and command/message type (cmd) should be reported to application. Each client could register more filters. To prevent filters duplication in kernel client state, UL_BFL_NORE flag could be specified. Then repeat registration of same filter is ignored. Assignment of zero value to some of fields results in ignoring of such field when message is reported to clients.- ul_msginfo msginfo; memset(&msginfo,0,sizeof(msginfo)); msginfo.dadr=filt_dadr; msginfo.sadr=filt_sadr; msginfo.cmd=filt_cmd; ret=ioctl(ul_fd,UL_ADDFILT,&msginfo); if(ret<0) { printf("add filter failedn");return ret;};
4.2 Query Module Type
Query for type of module with specified address returns short string describing connected module. Every uLan communicating device or module should implement immediate processing of UL_CMD_SID command. Query can be used for initial searching for all connected active modules. Next function call with previously opened driver handle returns in case of success allocated buffer filled by null terminated string describing module with module_adr. Negative return value indicates error - no reply from module or other problem.- ret=ul_send_query_wait(ul_fd, module_adr, UL_CMD_SID, UL_BFL_NORE - UL_BFL_PRQ, NULL, 0, (void**)&buf, &buf_len);
- it should contain ".mt" tag followed by space and one word module or device type
- software version can follow after next space
- other specifications with ".xx" tags can follow
- ".mt" module type
- ".mv" module vendor short name
- ".uP" microprocessor family, used for selection of right debugger
- ".dy" module supports dynamic address assignment
4.3 Network Control Messages
This one frame message of UL_CMD_NCS type is used for changing of module address and other network management purposes. Message processing is not strictly required for all developed modules. Same messages result in sending of reply. Reply is send as regular queued message in uLan multi-master environment, no interrupt immediate processing is necessary. Many of commands use module unique four bytes serial number assigned by producer. It is necessary for dynamic address assignment described in next paragraph. Producer is responsible that no pair of all existing modules has same number. Main uLan serial number authority is PiKRON Ltd.[5] company. When module wants to use NCS and its serial number could not be assigned, it must report serial number with the most significant byte SN3 equal to 0xFF. Random constant values for rest of serial number can sometimes help or be used for experimental devices. Next sub-commands specified by the first data byte are used:| Subcommand | Format after first byte | Description |
| ULNCS_RQ_ADDR | SN0 SN1 SN2 SN3 | Request for new address |
| ULNCS_SET_ADDR | SN0 .. SN3 NEW_ADR | Set new module address |
| ULNCS_SID_RQ | Request identification reply | |
| ULNCS_SID_RPLY | SN0 .. SN3 SID_string | Reply with SN and identification |
| ULNCS_ADDR_NVSV | SN0 SN1 SN2 SN3 | Permanent address change |
4.4 Dynamic Address Assignment
This protocol is mainly defined for environments witch frequent changes, working modules plug and transfer between networks. It demands and uses serial number comparison, implementation of network control services UL_CMD_NCS command and immediate status reply command UL_CMD_SNST. One dynamic address server must be connected to each network and status check cycle must be repeated. Each cycle first status check message with subcommand <=3 and broadcast address serves as dynamic server address publication. Server than individually asks all known modules for status (subcommand 16) and collect this information for other purposes. After connected module receives three times server start cycle message and no status check message, it uses ULNCS_RQ_ADDR to request address assignment from server. For case of reconnecting of working module from one to another network, address collision could occur. Next checking prevents such situation. When module receives status query with different serial number, module address is reset to zero and address assignment request is send to the server. Serial number check could be requested as the first command of object interface message as well. This protect reception of module properties writes, reads and commands for critical time window after reconnection of module into different network and reception first status query message.5 uLan Object Interface Layer
The uLan object interface allows to access (querying and setting) device (node/instrument) objects (properties, variables and services activations in this meaning) organized in dictionary. Each objects has assigned identifier number (OID) by which it can be found in a given directory in object dictionary. The services to list objects accessible for reading and writing are defined. The original design allowed to use same OID with different data type for read and write in theory, but actual use, current design and upper level libraries expect, that same type is used for read and write if both functions are available. A message format is designed to be as short as possible, but does not compromise generality. This approach results in more complex node/instrument profile. The uLan Object Interface enables to store object descriptions directly into devices (nodes/instruments) and provides way to automatically build node profile from the descriptions.5.1 Object Interface Messages and Basic Services
For communication with Object Interface (OI) in device command UL_CMD_OISV (0x10) is used. The general OI message data structure on the network is composed from 3 byte header and serialized OI data. The OI header bytes are defined to identify request reply correspondence and to specify under which command reply is send:| bcmd | sn | bsn |
| 1 byte | 1 byte | 1 byte |
- bcmd
- back command used as destination command for reply
- sn
- serial number (if unused set to 0, if used then range 0x40 to 0x7f should be used)
- bsn
- back serial number, copied serial number of request into reply
| where | value is request | value in reply |
| frame Cmd | cmd | bcmd |
| data[0] | bcmd | bcmd |
| data[1] | sn | bsn |
| data[2] | bsn | sn |
| OID number | OI_data |
| 2 bytes LE | data bytes or meta specification (0...n) |
- OID
- (object identifier) defines key for access of the object data or service activation
- OI_data
- specifies contents of the OI number.
| Name | OID | hex | Parameters | Description |
| ULOI_AOID | 10 | 0x0A | <string> | substitutes numeric OID by ASCII name for I_DOII and I_DOIO |
| ULOI_DOII | 12 | 0x0C | <oid> | query description for writable/in <oid> returned ULOI_DOIIr |
| ULOI_DOIIr | 13 | 0x0D | <oid> <oiddesc> | description of writable/in <oid> |
| ULOI_DOIO | 14 | 0x0E | <oid> | query description for readable/out <oid> returned ULOI_DOIOr |
| ULOI_DOIOr | 15 | 0x0F | <oid> <oiddesc> | description of readable/out object <oid> |
| ULOI_QOII | 16 | 0x10 | <oidfrom> <maxret> | query up-to <maxret> writable/input OIDs list starting from <oidfrom> or 0 for first |
| ULOI_QOIIr | 17 | 0x11 | <oid0>... <oidn><0> | list of writable/in OIDs ended by 0 |
| ULOI_QOIO | 18 | 0x12 | <oidfrom> <maxret> | query up-to <maxret> readable/out OIDs list starting from <oidfrom> or 0 for first |
| ULOI_QOIOr | 19 | 0x13 | <oid0>... <oidn><0> | list of readable/out OIDs ended by 0 |
| ULOI_RDRQ | 20 | 0x14 | <oid0>... <oidn><0> | object values read request, sequence of (OID[,meta]) groups, activates reply ULOI_RDRQr |
| ULOI_RDRQr | 21 | 0x15 | <oid0><...> ... <oidn><...><0> | reply sequence of (OID,[meta,]value) groups |
| ULOI_SNCHK | 29 | 0x1D | <SN0 .. SN3> | check module serial number |
| I_STATUS | 30 | 0x1E | standard OID for 16 bit status read (0 not active, positive busy, negative error) | |
| I_ERRCLR | 31 | 0x1F | standard OID for clear error status | |
5.1.1 ULOI_AOID
Reference on the OID numbers should be rather specify by self name. This conversion is mainly used for the ULOI_DOIx, where ULOI_AOID switch from value references into ASCII reference. Network ULOI_AOID references:| ULOI_AOID | OID by name |
| 0x0A 0x00 | vs (visible string) |
| OID_number |
| 0xdc 00 |
| ULOI_AOID | name size | name |
| 0x0A 0x00 | 0x04 | 0x54 0x45 0x4D 0x50 |
5.1.2 ULOI_DOII/ULOI_DOIO
ULOI_DOII/ULOI_DOIO numbers are used to get name and data types descriptors of the specific object defined by OID number. Network data format for this commands are defined:| ULOI_DOII/ULOI_DOIO | OID_number |
| 0xC/0xE 0x0 | 2 bytes LE |
| ULOI_DOIIr/ULOI_DOIOr | OID number | text descriptors (name, type) |
| 0xD/0xF 0x0 | 2 bytes LE | 2 level nested length byte, data block structure |
- ND
- name descriptor
- TD
- type descriptor
| total descriptors len | ND_size | ND_text | TD_size | TD_text |
| 1byte | 1byte | ND_size bytes | 1byte | TD_size bytes |
| ULOI_DOII | OID_number |
| 0xC 0x0 | 0x1F 0x00 |
| ULOI_DOIIr | OID_number | tot. len | ND_size | ND_text | TD_size | TD_text |
| 0xD 0x0 | 0x1F 0x00 | 0x9 | 0x6 | 0x45 0x52 0x52 0x43 0x4C 0x52 | 0x1 | 0x65 |
5.1.3 ULOI_QOII/ULOI_QOIO
ULOI_QOII/ULOI_QOIO numbers are used to get list of input/output OID numbers. Network data format for this commands are defined:| ULOI_QOII/ULOI_QOIO | start OID_number or 0 | max reply count |
| 0x10/0x12 0x0 | 2 bytes LE | 2 bytes LE |
| ULOI_QOIIr/ULOI_QOIOr | n x OID_number | termination |
| 0x11/0x13 0x0 | n x 2 bytes LE | 0x00 0x00 |
| ULOI_QOII | start OID_number or 0 | max reply count |
| 0x10 0x0 | 0x00 0x00 | 0x40 0x00 |
| ULOI_QOIIr | OID | OID | OID | OID | OID | OID | termination |
| 0x11 0x0 | 0xC 0x0 | 0xE 0x0 | 0x10 0x0 | 0x12 0x0 | 0x14 0x0 | 0x1F 0x0 | 0x00 0x00 |
5.1.4 ULOI_RDRQ
The basic object dictionary directory level is used for direct write to the objects in main directory and for acquiring lists and information about these objects. When values of objects should be read, the level is switched into ULOI_RDRQ level in which only OIDs and meta data are serialized. The ULOI parser responses to the switching into read level by generating reply with actual objects values filed in. The reserved OID number 0 is used for return back to the write direction. Example of the data format to read value of OID number 230 with type u2: Request:| ULOI_RDRQ | OID_number |
| 0x14 0x00 | 0xE6 0x00 |
| ULOI_RDRQr | OID_number | u2 data read from object |
| 0x15 0x00 | 0xE6 0x00 | 0x63 0x00 |
| OID_number | u2 data to write into object |
| 0xE6 0x00 | 0x64 0x00 |
| OID_number | u1 data to write | ULOI_RDRQ | OID_number |
| 0xE7 0x00 | 0x10 | 0x14 0x00 | 0xE7 0x00 |
| ULOI_RDRQr | OID_number | u1 data read from object |
| 0x15 0x00 | 0xE7 0x00 | 0x10 |
5.2 uLOI Data Exchange
All data exchange is using little-endian format. The data length is not encoded in the OI read/write messages to preserve space. The data types and lengths has to be known/retrieved on the uLOI dictionary access client side in advance. The basic concept for data exchange is based on sequences of bytes introduced by OID number and optionally additional meta data (array index, range etc.). Support for multiple directory levels of objects is possible but not in use for now. Sequences of OIDs or OID+data replies are terminated by zero OID (two zero bytes), which returns processing state back to previous level. The basic level is used for direct write to the objects in main directory and for acquiring lists and information about these objects. When values of objects should be read, the level is switched into ULOI_RDRQ level in which only OIDs and meta data are serialized.5.3 uLOI Data Types
Basic numeric data types use convention where type base is specified by single character and numeric suffix specifies number of bytes used for type encoding.| code | description | encoded |
| s1, s2, s4 | signed integer | little-endian bytes sequence of corresponding length |
| u1, u2, u4 | unsigned integer | little-endian bytes sequence of corresponding length |
| f4, f8 | floating point number | according to IEEE-754, little-endian, 4-bytes/8-bytes |
| f2 | half float (float16) | |
| vs, vsXX | visible string in utf-8 | the first byte specifies length of the string in bytes (0-127) encoded in following bytes |
5.3.1 Visible string
Visible string should defined maximal size of ASCII char in the text description followed after "vs". "vs12" defines string with maximal ASCII size of 12 chars. Network format for visible string is:| length | text |
| 1 byte (0..127) | length byte(s) |
| 0x04 | 0x41 | 0x42 | 0x43 | 0x44 |
5.3.2 Arrays
The network format for array access encodes index or index range as meta data and then sequence of array items follows directly as data part of the stream. The request for array items read contains only meta data part (index or index range) without data. The reply contains index/index range followed by items data sequence. Index starts from value 0. The highest 2bits in first byte in data part are reserved in this meaning:| bit 7 | bit 6 | description |
| 0 | 0 | indexed single data item |
| 1 | 0 | indexed range of items |
| 1 | 1 | array command |
Indexed data
The network format for for meta-data part of request for indexed data item is:| index |
| 2 bytes LE (0...16363) |
| index 1 |
| 0x01 0x00 |
| index 1 | u4 data for index 1 |
| 0x01 0x00 | 0x11 0x00 0x00 0x00 |
5.3.3 Indexed range of data
The network format for meta-data part of request for indexed range of data is:| count | index |
| 2 bytes LE (0...16363) - 0x8000 | 2 bytes LE |
| count | index |
| 0x02 0x80 | 0x01 0x00 |
| count | index | u1 data for index 1 | u1 data for index 2 |
| 0x02 0x80 | 0x01 0x00 | 0x12 | 0x06 |
Array commands
Not currently used in this protocol version.6 uLan Connection Network
This subsystem is designed for direct process data (PDO) exchange between devices (nodes/instruments). Each data transfer is identified by connection ID (CID). Design allows to map one or multiple uLOI dictionary objects (properties, variables) as data source or destination for given CID. The mapping is stored directly in devices. Mechanism allows to transfer multiple CID identified data values in single message. Receiver identifies data scope only by CID, no source address or device internal uLOI OID assignment or meta-data format is encoded in PDO messages or directly influence the processing. This allows to connect objects with different OIDs, group multiple objects under single CID, use broadcast to distribute data into multiple destination devices or even use more devices as data source for same CID. When device receives PDO message it process each CID identified data according to configured mapping. CIDs and their respective data for which no mapping is found are simply skipped. There is only one requirement for the data and it is at least compatibility of data types for mapped source and destination OIDs. If destination type is shorter then source, remaining bytes are skipped, counter case is illegal for actual implementation.6.1 Process Data Messages Format
Command UL_CMD_PDO (0x50) is specified for PDO messages. Message format starts with two reserved bytes for future static extensions and one byte follows, which can be used for dynamic PDO messages header extensions in future. These bytes should be send as zero for current protocol version. Each data block is preceded by its CID and data length. Maximal individual data block length is 127 bytes for actual implementation and is encoded in single byte. Format allows future extension to two bytes in future if needed.| Res Lo | Res Hi | Ext len (el) | Ext | CID | data len (dl) | data | CID ... |
| 1 byte | 1 byte | 1 byte | 0..el bytes | 2 bytes LE | 1 (2) byte | dl bytes |
6.2 Connection ID to Objects Mapping
All configuration/mapping of PDO data source and processing of received PDO messages is done through device objects dictionary and data and meta-data formats are compatible with uLOI layer. Next objects are used for objects to CID specific data mapping.| Name | OID | hex | Parameters | Description |
| ULOI_PICO | 40 | 0x28 | array "[]{u2,u2,u2,u2}" | PDO input CID/OID mapping |
| ULOI_POCO | 41 | 0x29 | array "[]{u2,u2,u2,u2}" | PDO output CID/OID mapping |
| ULOI_PIOM | 42 | 0x2A | byte array "[]u1" | PDO input/output mapping meta data |
| ULOI_PEV2C | 43 | 0x2B | array "[]{u2,u2,u2,u2}" | PDO event to CID mapping |
| ULOI_PDC2EV | 44 | 0x2C | array not specified yet | PDO data change event mapping |
| ULOI_PMAP _CLEAR | 45 | 0x2D | command "e" | PDO input/output/meta/event mapping clear |
| ULOI_PMAP _SAVE | 46 | 0x2E | command "e" | PDO input/output/meta/event mapping save |
| Field | Type | Description |
| CID | u2 | connection identification |
| Flg | u2 | flags specifying mapping type |
| Meta/OID | u2 | byte offset into ULOI_PIOM data or direct OID specification |
| Meta len | u2 | length of meta data or 2 for direct OID specification |
| Symbol | Mask | POCO | PICO | Description |
| ULOI_CIDFLG_META_LOC | 0x0F | y | y | Interpretation of Meta/OID field |
| ULOI_CIDFLG_META_OID | 0x00 | y | y | OID specified directly |
| ULOI_CIDFLG_META_OFFS | 0x01 | y | y | ULOI_PIOM offset specified |
| ULOI_CIDFLG_META_EM3B | 0x03 | y | y | Embedded 3 bytes in Meta and Meta len |
| ULOI_CIDFLG_META_EM4B | 0x04 | y | y | Embedded 4 bytes in Meta and Meta len |
| ULOI_CIDFLG_FIXED | 0x10 | y | Supply received data by meta | |
| ULOI_CIDFLG_IMMED | 0x20 | y | Send directly meta-data, no processing | |
| ULOI_CIDFLG_SKIP_LOCAL | 0x40 | y | Do not process locally | |
| ULOI_CIDFLG_SKIP_SEND | 0x80 | y | Do not send data |
6.3 Events to Process Messages Mapping
The ULOI_PEV2C array specifies, which CID/CIDs identified transfers should be initiated when given event number is activated. One event can be specified multiple times to trigger multiple CID transfers. The ULOI_PEV2C array entry specifies event number to CID mapping and some flags to nail down CID processing.| Field | Type | Description |
| Evnum | u2 | event number triggering transmission |
| CID | u2 | CID to be send |
| DAdr | u2 | destination uLan address, 0 broadcast |
| Flg | u2 | flags influencing processing |
| Flag | Mask | Description |
| ULOI_PEV2CFLG_ARQ | 0x01 | request acknowledge by recipient |
| ULOI_PEV2CFLG_LOCAL | 0x02 | use queue for local only processing |
References
- [1]
- uLan protocol for RS-485 9-bit network, SourceForge.net project page http://ulan.sourceforge.net/
- [2]
- Komunikacni protokol uLan, Pavel Pisa http://cmp.felk.cvut.cz/~pisa/ulan/dipl_kom.html
- [3]
- Directory with older versions of uLan Driver for Linux, Pavel Pisa http://cmp.felk.cvut.cz/~pisa/ulan/
- [4]
- uLan Driver for Linux, Pavel Pisa http://cmp.felk.cvut.cz/~pisa/ulan/ul_drv-0.6.0.tar.gz
- [5]
- PiKRON Ltd., Laboratory Instruments Developers , http://www.pikron.com/
- [6]
- Stanislav Hrbek, Diploma Thesis, 2009, Praha
File translated from TEX by TTH, version 3.85.
On 27 Apr 2010, 16:03.